Un astronaute de l’ESA, à bord de la Station spatiale internationale (ISS) s’est promené vendredi sur la Terre, grâce à un nouveau système robotique.
Peu après 11h30, heure de Paris (09h30 GMT), l’astronaute de l’ESA Alexander Gerst a commandé à distance le robot humanoïde Rollin ‘Justin dans le Centre aérospatial allemand DLR à Oberpfaffenhofen.

Ce test de 2 heures avait pour objectif de tester cette technologie qui permettra aux futures équipes d’expédition d’explorer d’autres planètes tout en restant en orbite.
Selon l’ESA (l’Agence spatiale européenne), le test de vendredi est le dernier d’un projet de réseau d’opérations robotiques de bout en bout multi-agence (METERON) visant à tirer le meilleur des missions habitées et robotisées. Les robots sont beaucoup moins chers à envoyer dans les missions planétaires. Il n’y a pas de coûts d’atterrissage et d’exploitation à la surface des planètes et des lunes.

Cependant, même les robots les plus avancés sont limités dans ce qu’ils peuvent faire ; et les missions planétaires sont si éloignées que les signaux radio peuvent prendre des minutes ou des heures pour atteindre le robot.
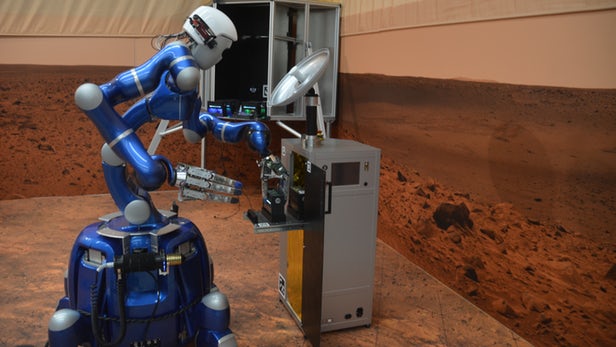
Pour le test de vendredi, Rollin ‘Justin était contrôlé par Alexander Gerst à partir de l’ISS à l’aide d’une tablette. Elle permettait à l’astronaute de voir du point de vue du robot lorsqu’il travaillait sur un ensemble de panneaux solaires ; dans un paysage martien simulé.

« Ce que nous recherchons avec ces expériences, c’est de démontrer que les robots sont de véritables collègues auxquels donnent des commandes abstraites que les robots peuvent calculer localement puis effectuent. Nous voulons voir comment nous pouvons rendre l’interaction aussi simple et intuitive que possible ; tout en augmentant la complexité des tâches lors de chaque expérience.»
Pour conclure, sachez que Rollin ‘Justin est un robot humanoïde introduit en 2008. Il mesure 1,91 m et pèse environ 200 kg. Il peut fonctionner pendant plus d’une heure sur sa batterie interne. Enfin, il peut se déplacer jusqu’à 7,2 km/h.